EV 폐배터리팩의 인간-로봇 협업 해체 공정 1차 개발
인공지능을 접목한 인지 및 해체, 관제 S/W 기술 개발 중
한국로봇융합연구원(원장 여준구)이 ‘다품종 EV폐배터리팩의 재활용을 위한 인간-로봇 협업 해체작업 기술개발 사업’ 수행을 위한 폐배터리 해제 공정의 1차 개발작업을 마무리했다고 밝혔다.
본 사업은 산업통상자원부, 경상북도, 포항시의 지원으로 2022년부터 5년 동안 총 95억 원을 투입하여 여러 종류의 전기차 폐배터리팩을 분해·해체할 수 있는 자동화 공정 및 로봇 지능 기술 개발을 목표로 한다.
전기자동차의 급속한 보급에 따라, 리튬, 코발트, 니켈 등의 배터리 원료가격이 급격히 오르면서 폐배터리의 원료 회수를 위한 재활용 시장도 매우 커지고 있다. 현재는 재활용으로 배출되는 전기차 폐배터리 수량이 적어 수작업으로 해체 후 재활용 공정에 투입되지만, 2030년에는 전 세계적으로 400만대 이상의 폐배터리가 발생하고 약 60조원의 재활용시장이 형성될 것으로 예측되며, 이후 매년 기하급수적인 증가가 예상되어 로봇을 활용한 해체 자동화 기술은 매우 유용할 것으로 판단된다.
폐배터리팩의 해체는 수작업으로 진행되던 방식 전체를 로봇으로 모두 대체하기는 어려우며 사람 작업자와 협업을 통해 해체하는 공정으로 개발되고 있다.
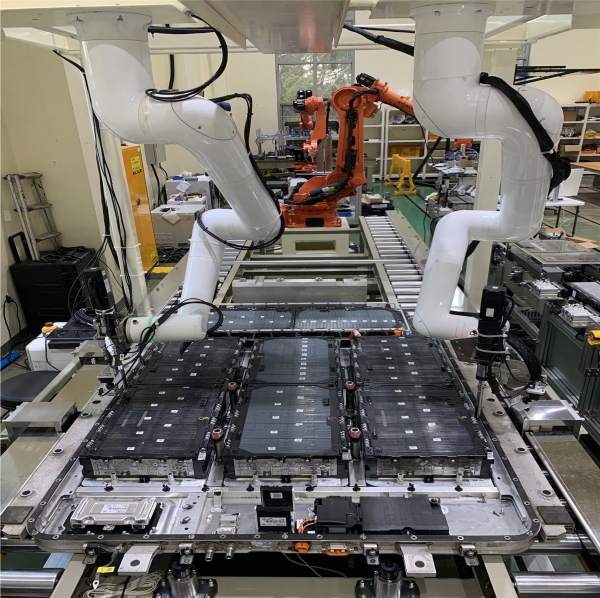
한국로봇융합연구원은 폐배터리 해체 공정 중 1차적으로 자동화가 가능한 부분을 중심으로 산업용 로봇 및 협동 로봇을 이용한 해체 공정 설계를 완료했다.
로봇 작업의 효율성을 도모하기 위해 해체가 어려운 볼트 및 브라켓 등의 부품을 제거하기 위한 전용 툴과 다양한 종류의 폐배터리 해체 공정에 적용하기 위한 이송 시스템을 설계했고, 여러 형상의 폐배터리를 인식하고 해체 작업을 구성할 수 있는 ‘intelligent task scheduling(ITS) S/W’를 개발 중이다.
이 ‘ITS S/W’는 부품들의 부식 및 마모 등에 따라 로봇 해체 작업의 가능여부를 판단할 수 있는 인지기술과 더불어 작업 가능여부, 완료여부 등에 따라 작업 순서를 재구성할 수도 있는 지능과 전체 공정의 진행사항을 관리하는 기능도 포함되어 있다.
한국로봇융합연구원 정구봉 선임연구본부장은 “올해 완료된 폐배터리 해체 공정 설계를 기반으로 3차년도에는 다품종 폐배터리 해체 공정 구축, 4~5차년도에는 실증 및 고도화를 통해 전기차 폐배터리의 인간-로봇 협업 해체 공정의 안정성을 확보하고 수요기업을 중심으로 실증에 나설 예정이다”고 밝혔다.